Wireless Multi-Modal Foot Interface Controller
Improving Ergonomic Efficiency in the Operating Room
Project Team Members
Will DeCotiis, Jason Lin, Anastasiia Rudaeva, Wenqi Di
Department of Biomedical Engineering, University of Rochester
Team Members

Wenqi Di
Biomedical Engineering & Economics
Role: Hardware, Software, and Control System Development & Integration

Anastasiia Rudaeva
Biomedical Engineering
Role: Software Development

Jason Lin
Biomedical Engineering
Role: Hardware Development & Control System

Will DeCotiis
Biomedical Engineering
Role: Software Development
Project Overview
Our team developed a wireless, foot-mounted controller with gesture recognition to replace traditional surgical foot pedals. This innovative solution addresses the challenges surgeons face when navigating between multiple foot pedals during operations, improving ergonomics and reducing pedal activation errors.

Problem Statement
Navigating between multiple foot pedals to control surgical tools is challenging and limits surgeons’ freedom of movement. Current systems force surgeons to:
- Remain in one position for long durations.
- Struggle to locate pedals accurately.
- Risk pressing the wrong pedal (potentially dangerous).
Key Statistics [1]:
- 91% of doctors occasionally lose contact with foot pedals.
- 56% find this very frustrating.
- 75% occasionally hit the wrong switch.
- 93% want a better control solution.
Project Objectives
- Program wireless controller to recognize specific gestures.
- Create reliable wireless connection between controller and pedal chassis box.
- Ensure latency <200ms between command and tool activation.
- Build chassis box that presses pedals accurately based on gestures.
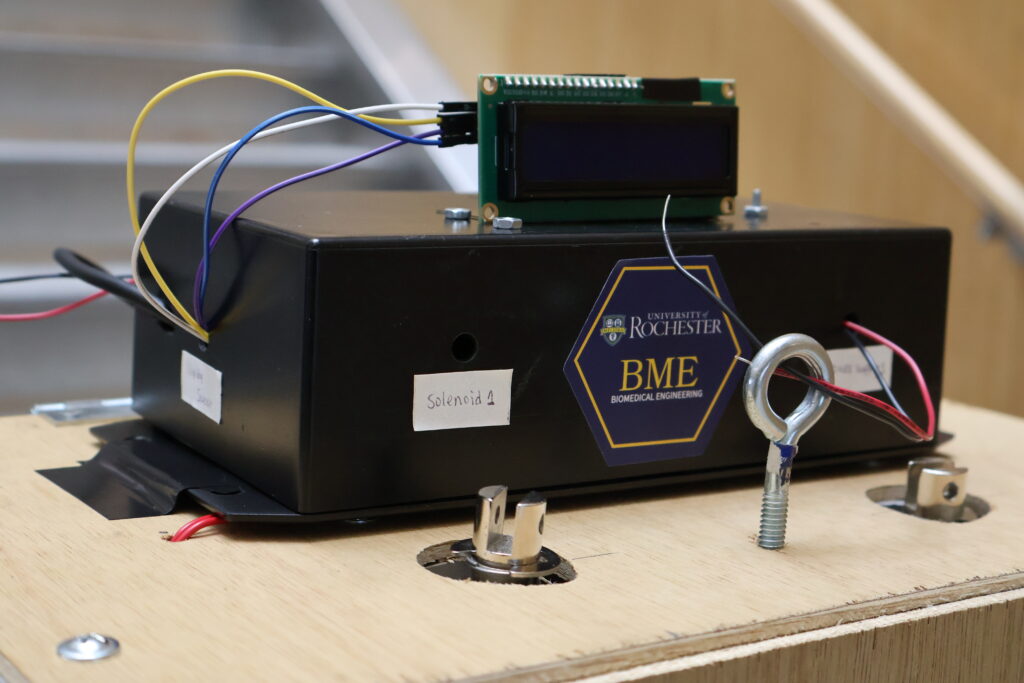
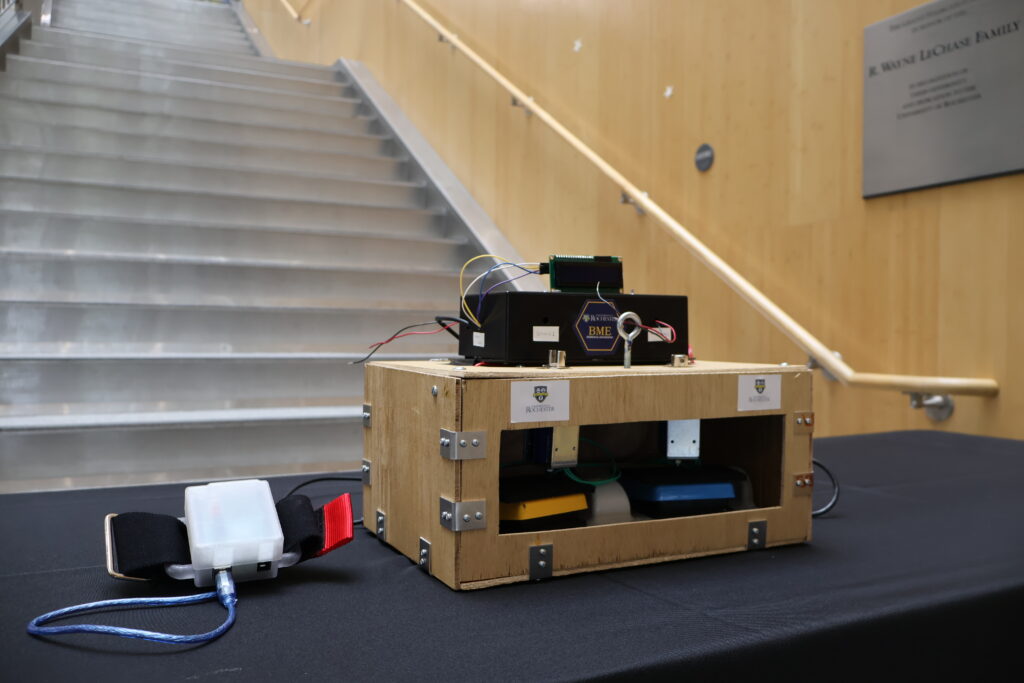
Our Solution
A functional prototype that:
- Controls 2 surgical tools via toggle-switching.
- Features “listening mode” to prevent accidental activation.
- Displays active tool/mode on LCD screen.
- Achieves latency below 100ms.
Key Components:
- Bipolar On/Off Foot Switch Pedals.
- MOSFET Trigger Switch Drive Module.
- LCD Display Screen.
- Solenoid Electromagnets.
Performance Data
Testing confirmed:
- Consistent, reliable activation.
- Latency significantly below 200ms target.
Future Improvements
- Further reduce latency (clinical priority).
- Add proportional control for surgical drills.
- Expand to control up to 4 pedals and surgical tools.
Acknowledgements
We would like to thank our BME faculty advisor Dr. Laurel Carney, clinical collaborator and customer Dr. Jonathan Stone, and the entire Stone Lab team for their support. Special thanks to Professors Seidman and Castañeda, and to Martin Gira, Paul Osborne, Kyle Ohlschlager, and James Alkins for technical guidance. Lastly, thank you to our Project Liaison Erin Mulholland.
Reference
[1] Van Veelen et al. (2003), Surgical Endoscopy.