Customer: Dr. Ram Haddas, Department of Orthopedics at University of Rochester Medical Center
Supervisor: Dr. Veena Ganeshan, Senior Instructor at University of Rochester
Overarching Goals: Enhance fall rehabilitation through controlled perturbations, ensure patient safety & comfort, enable clinician customization and control, accommodate diverse patient population (sizes & weights), and ensure durability/long-term usage.
Customer Scenario: The perturbation tool is designed for older adults recovering from falls, primarily used in clinical rehabilitation settings such as Dr. Ram Haddas’ orthopedic facility. Patients will wear a pelvic belt attached to a four-cable pulley system that applies controlled perturbations in cardinal and intercardinal directions, simulating real-world balance challenges. The patient will be walking on a treadmill during this process to mimic day-to-day motions. Physical therapists will oversee patient therapy sessions, adjusting force intensity and direction based on the patient’s specific rehabilitation needs. The system is intended to seamlessly integrate with existing lab technology including motion capture sensors mounted on the harness, camera systems placed around the perimeter of the room, and methods to monitor and refine patient progress. To maximize flexibility and clinical workflow efficiency, the device will also be designed to be easily detachable from its support frame. The device will enhance patients’ rehabilitation process while ensuring safety, adaptability, and ease of use for clinicians and patients alike.
Design Concept: The system is designed to deliver controlled, directional balance perturbations for fall rehabilitation. It uses a four-cable pulley system connected to an adjustable pelvic belt worn by the patient. The cables are paracord and attach to the belt using carabiner rope tighteners for a customizable distance from the poles. The four stepper motors are controlled by an Arduino, with one power supply shared between two motors. A MATLAB GUI allows clinicians to input force magnitude and direction. The system features an emergency stop button for safety and immediate stop of all perturbations being applied. The design prioritizes clinical usability and integration with the orthopedic lab’s existing system.
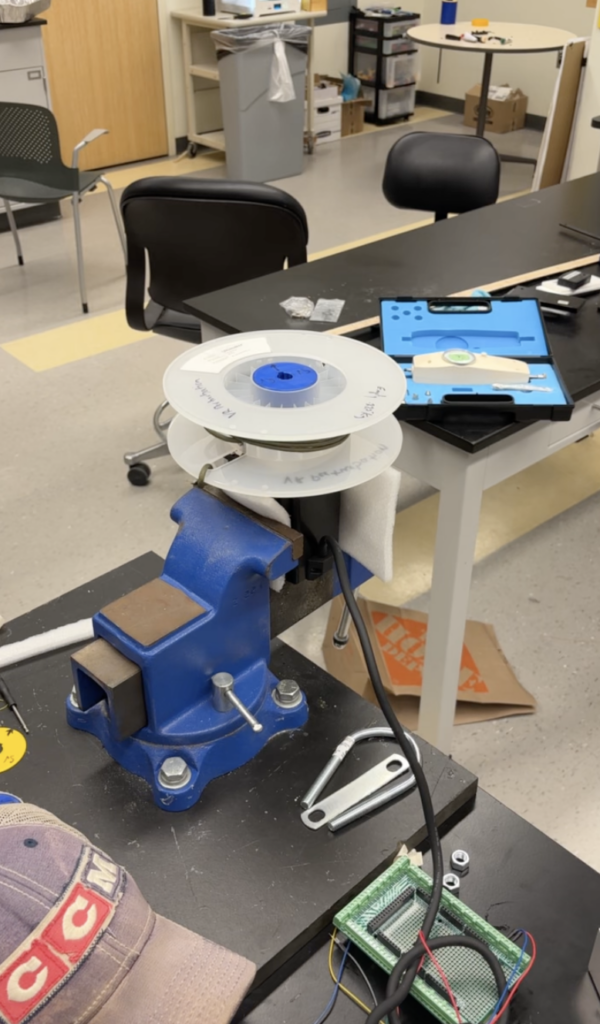
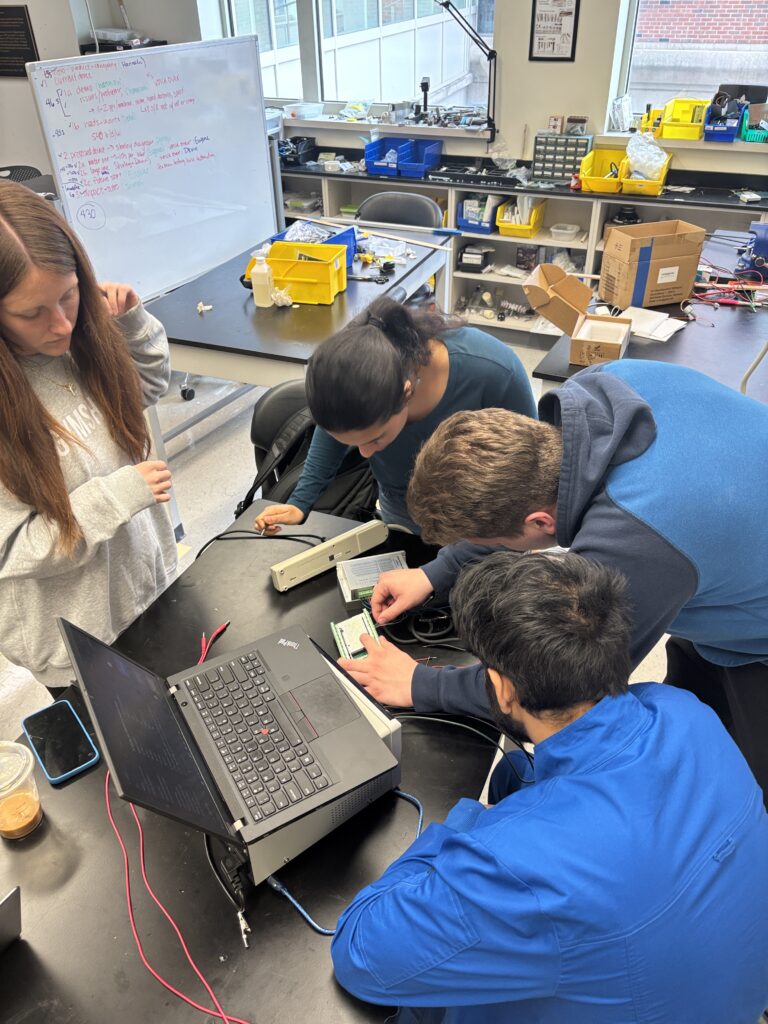
Prototyping Process/Approach: Some of the prototyping process is displayed below from testing the drum on the motor to wiring the Arduino components.
Evaluation/Feedback: Throughout the prototype and development process, we received valuable feedback to enhance the functionality of the system. One suggestion from the customer was to spray paint the metal clamps black to prevent them from interfering with the motion capture system. They also requested a rubber coating that can be added to prevent damage from the clamps sliding on the vertical poles. Another recommendation was to reduce the delay between command input and motor actuation to produce more rapid and realistic perturbations, parallel to what one might experience in daily life. Additionally, our professors emphasized the importance of incorporating an easily accessible emergency stop button to ensure patient safety during unexpected events. These points have guided refinements throughout the prototyping process and in software development.
Future Directions: Future improvements include greater motor testing to explore the limits of force generation and if it can be refined to produce precise perturbations . Alongside this, integration with the lab’s motion capture system (Vikon) would allow for a comprehensive system where all inputs can be accessed from one central program. This may assist in better tracking of patient progress, so personalized treatment plans can be generated for them. Lastly, exploring the use of different materials for the harness and pulley system could improve the level of comfort and durability for the patient.