Team Members




Shannon Fung, Jialu Xu, Joselyn Wei Chen, Anakin De la Cruz
Supervisor

Diane Dalecki, Ph.D.
Kevin J. Parker Distinguished Professor in Biomedical Engineering
Professor of Electrical and Computer Engineering
Director, Rochester Center for Biomedical Ultrasound
Customer


Sarah Wayson-Madejski, Ph.D
Nicole A. Wilson, Ph.D., M.D.
Wilson ECLIPSe Lab
Introduction
Pediatric anal sphincter malformations present significant challenges for accurate diagnosis and surgical treatment due to limitations in current imaging technologies. Existing ultrasound systems lack the precision and adaptability needed to consistently visualize the microstructures of small, sensitive tissues. High-frequency ultrasound imaging provides potential for improved diagnostic clarity, but misalignment between the imaging system and the region of interest (ROI) reduces resolution and reliability. Thus, eucentricity is not preserved, which is defined and established when a sample can be tilted and the selected ROI remains in the field of view (FOV).
Existing systems require manual adjustments to maintain focus and alignment of the transducer
with the ROI during imaging. This process is highly time-consuming, currently taking approximately 40 seconds per image, and prone to human error. Misalignment leads to reduced imaging resolution, particularly at sample edges or when tilted. Pediatric applications further demand non-invasive, precise, and reliable imaging due to the small size and sensitivity of the anal sphincter complex.
Our project addresses misalignment between the imaging system and the ROI by designing a system that establishes and maintains precise eucentricity by keeping the ROI at the center of the imaging plane even as the sample rotates. This automated solution improves imaging consistency and efficiency by minimizing manual adjustments.
Problem Statement
To ensure the user-defined ROI within an anal sphincter tissue sample remains consistently within the field of view FOV during high-frequency ultrasound imaging, regardless of the insonation angle, a novel sample adjustment mechanism is proposed. This system repositions the sample such that the ROI is centered within the imaging field before image acquisition, thereby establishing eucentricity. By aligning the ROI with the central axis of insonation, this approach eliminates the need for transducer repositioning during imaging, ensuring consistent focal zone alignment and reducing overall acquisition time.
Needs and Wants
Needs:
● Reduce image acquisition time
● Eliminate need for manual sample repositioning
● Automate eucentricity adjustment
● Automate sample tilting mechanism user-defined ROI targeting
● Allow users to select and accurately define a specific ROI for imaging compatibility with existing ultrasound system
● The system must work alongside the customer’s current high-frequency ultrasound system without requiring major modifications
Wants:
● Intuitive user interface (GUI)
● Easy-to-use software interface that improves user experience
Design Overview
Our Design
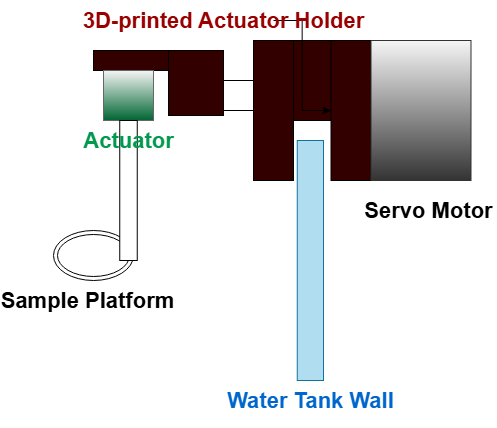
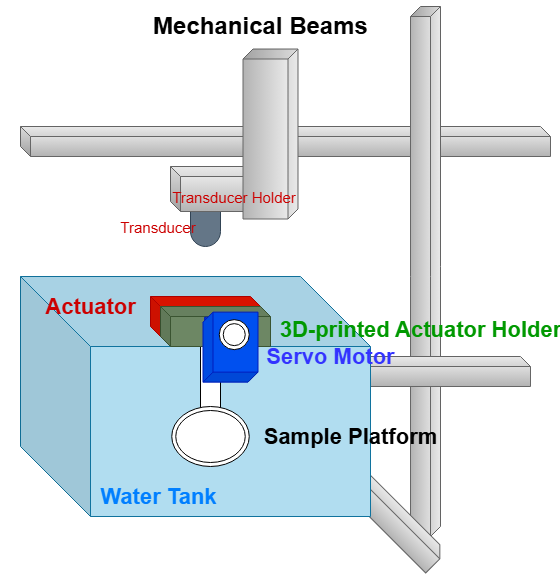

Hardware Component Breakdown
| Item | Purpose |
| Servo Motor | Automate rotational movement of system |
| Linear Actuator | Automate linear movement of system |
| Arduino | Microcontroller to allow servo motor and linear actuator to be controlled via MATLAB |
| Motor Driver | Power Amplification and signal translation to ensure motors receive correct voltage and current for proper operation |
| 3D Printed Component | Prevent underwater submersion of electronic components |

Software
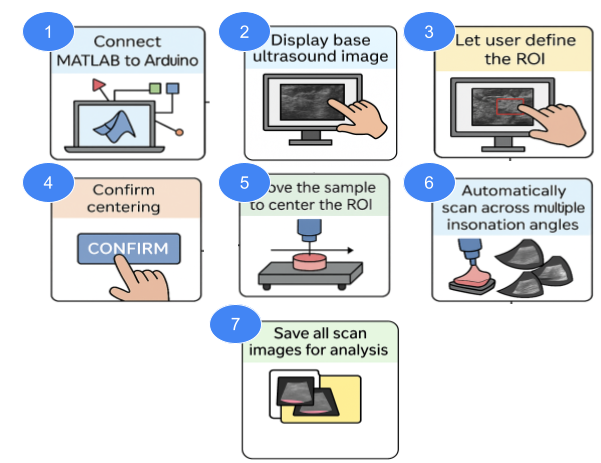
Our software was developed in MATLAB and designed to interface with an Arduino-controlled hardware system for automated ultrasound image acquisition. The workflow begins with establishing communication between MATLAB and Arduino (Step 1). Once connected, the base ultrasound image is displayed (Step 2), and the user is prompted to define the ROI by selecting it on the screen (Step 3). After ROI selection, the software guides the user through the centering process (Steps 4–5), allowing automatic adjustments to align the sample with the scanning axis. Once confirmed, the system automatically scans the sample across multiple insonation angles (Step 6) using pre-defined motor control commands. All images captured during the scan are then saved for further analysis (Step 7). This user-guided yet automated pipeline ensures precise positioning and reproducible data acquisition, enabling efficient multi-angle imaging for fixed tissue samples.
Testing & Validation
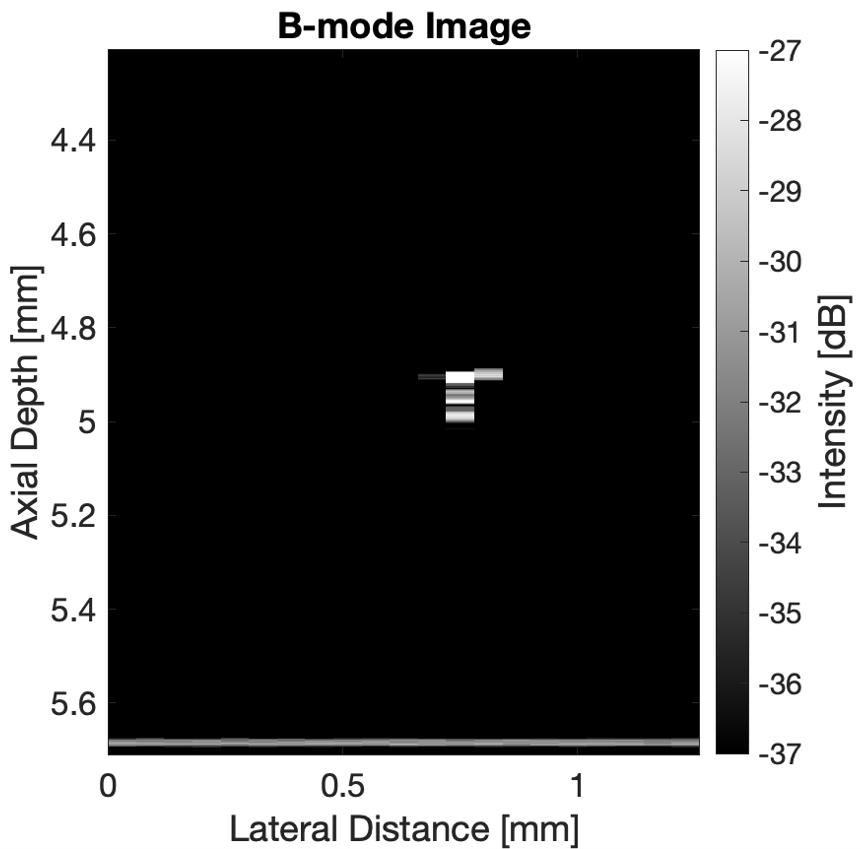

To validate the eucentricity adjustment system, a 50 µm thermocouple wire was imaged using a high-frequency ultrasound. The sample holder was initially positioned parallel to the ground, at 0°. The wire appeared as a distinct pixel on the B-mode image, representing its location. The sample was then incrementally rotated from 0° to 15°, in 1° steps. At each angle, the axial and lateral transducer displacement of the wire was measured to assess image shift relative to sample tilt. This analysis allowed for evaluation of our device’s ability to maintain eucentric alignment during angular adjustments.
Future Developments
● Expand the system for broader applications in clinical and research imaging beyond the anal sphincter tissue.
●Develop fully automated ROI detection and repositioning algorithms to minimize user input.
● Integrate machine learning models to predict tissue structural abnormalities and improve diagnostic capabilities.
● Adapt the system for imaging other muscle tissue or pediatric anatomical structures requiring precision analysis.
●Miniaturize hardware components to enable future in vivo imaging or clinical bedside use.
● Support the development of non-invasive diagnostic tools to better predict surgical outcomes and guide personalized treatment strategies for anorectal malformation patients and similar conditions.
Acknowledgements
We would like to express our sincere gratitude to the following individuals and organizations for their invaluable support and guidance throughout this project:
● Faculty Supervisor: Dr. Dalecki for their mentorship, technical guidance, and insightful feedback.
● Customers: Dr. Wilson and Dr. Wayson for providing resources and system specifications.
● Faculty Advisors: Dr. Seidman and Dr. Castaneda for their continuous support and advice.
● Funding Sources: BME Department, for financial support that made this project possible.