Team Members
Samantha Okinow
Marcos Dos Santos
Hao Yin
Ethan Fahnestock
Supervisors
Professor Christopher Muir and Professor Laura Slane
Customers
Professor Thomas Howard
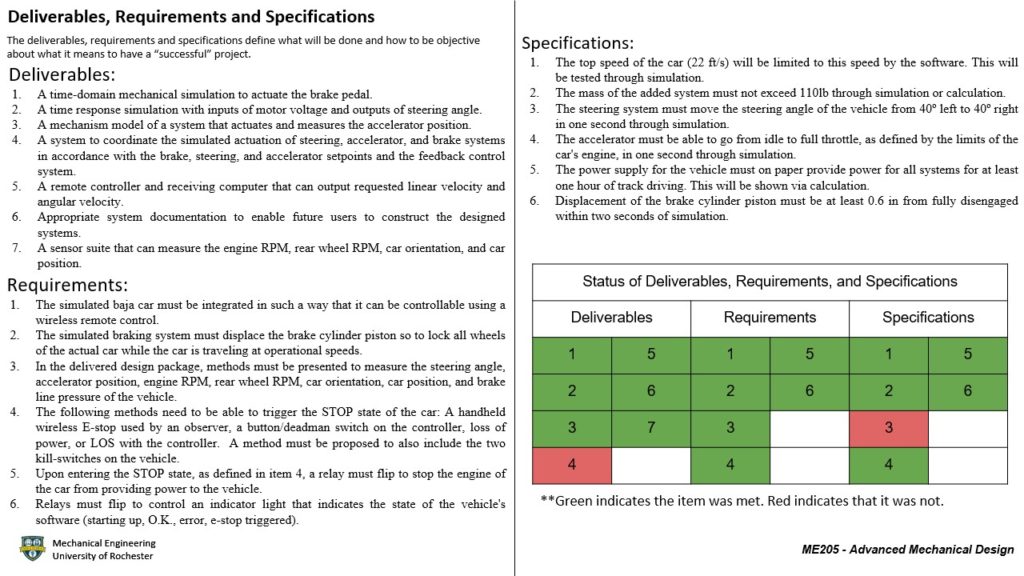
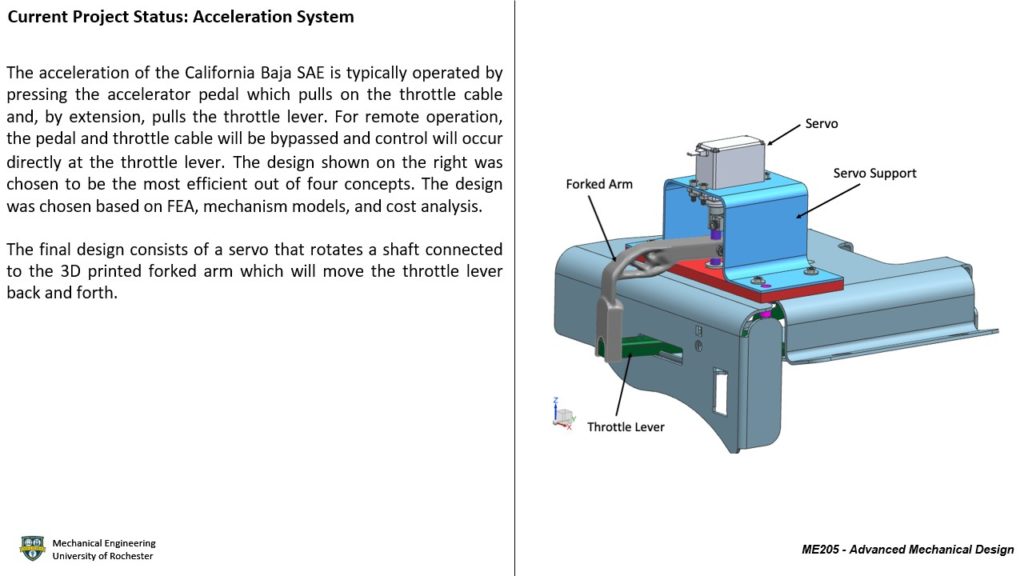
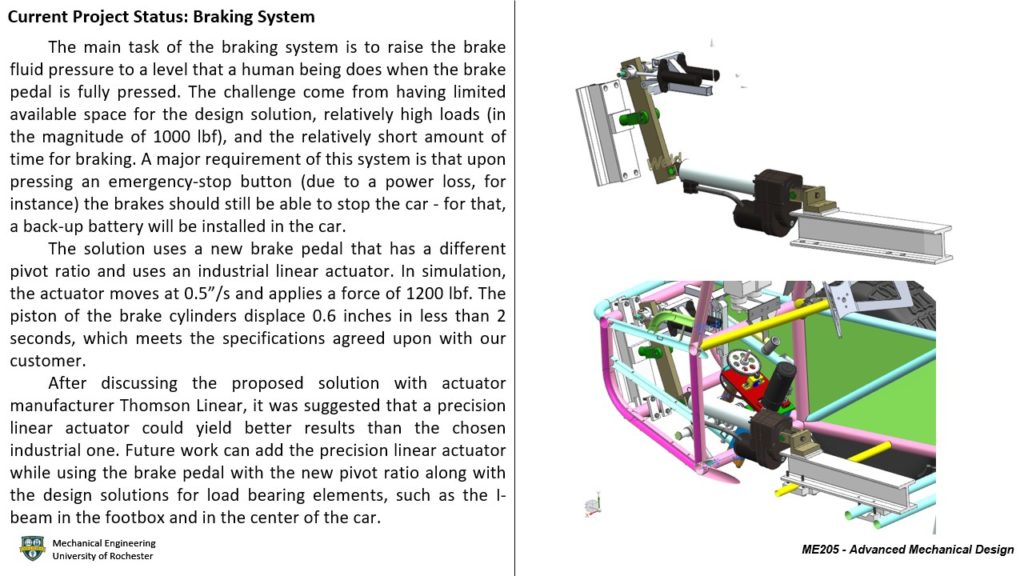
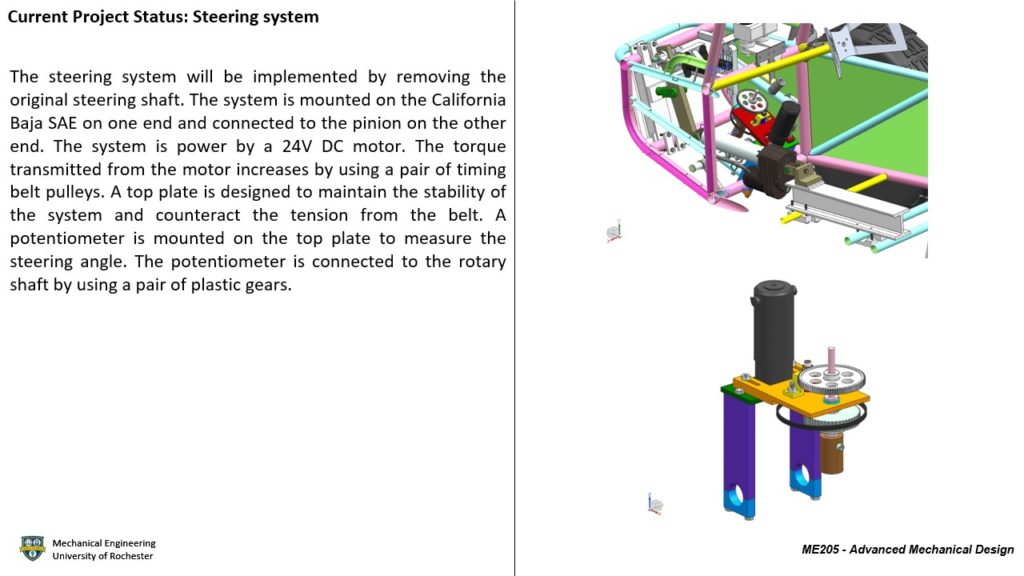
Description
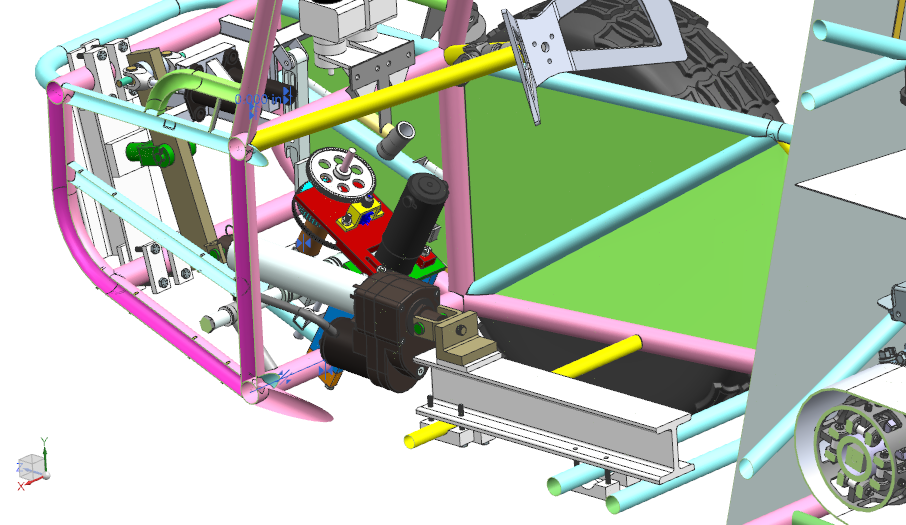
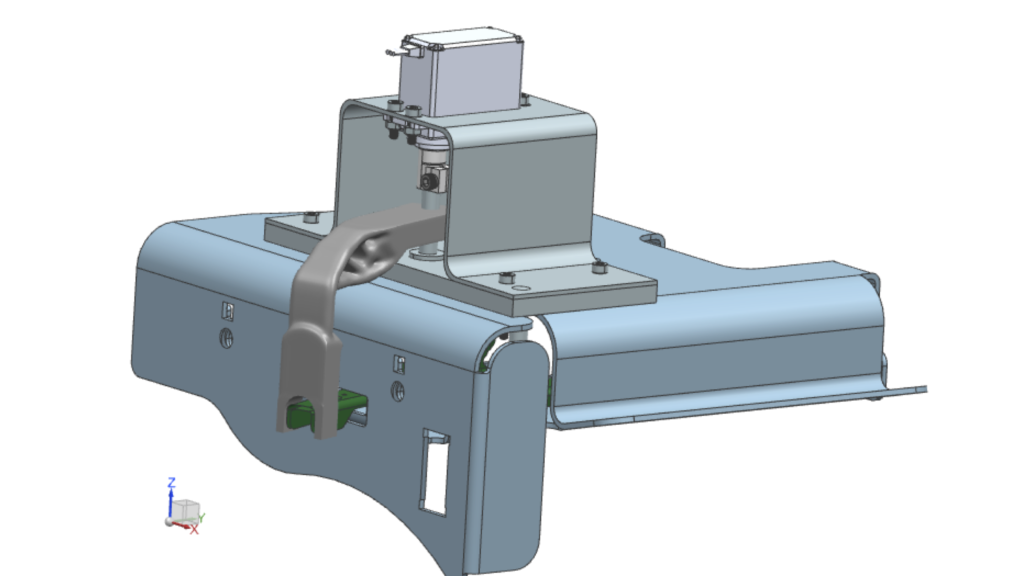
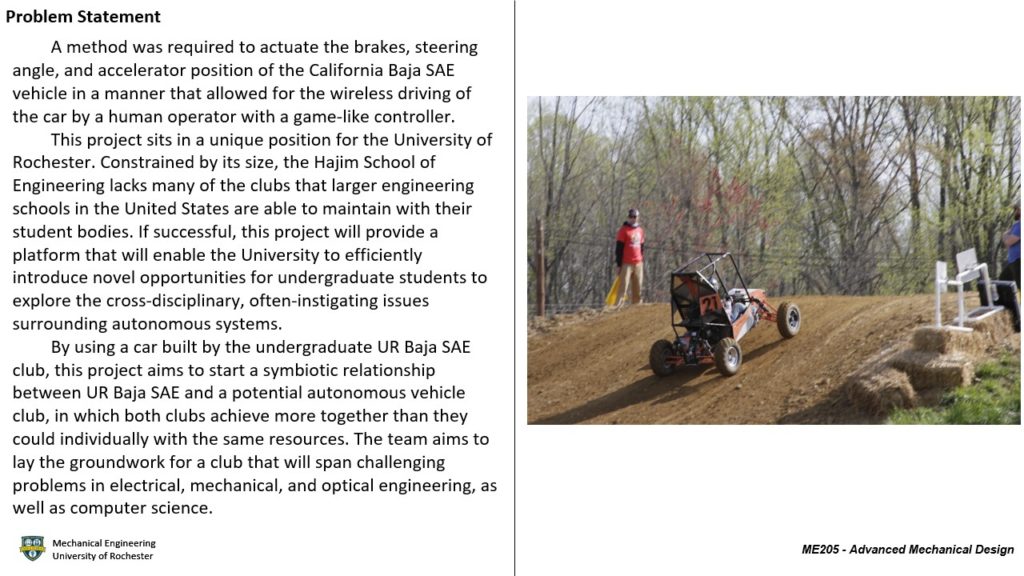
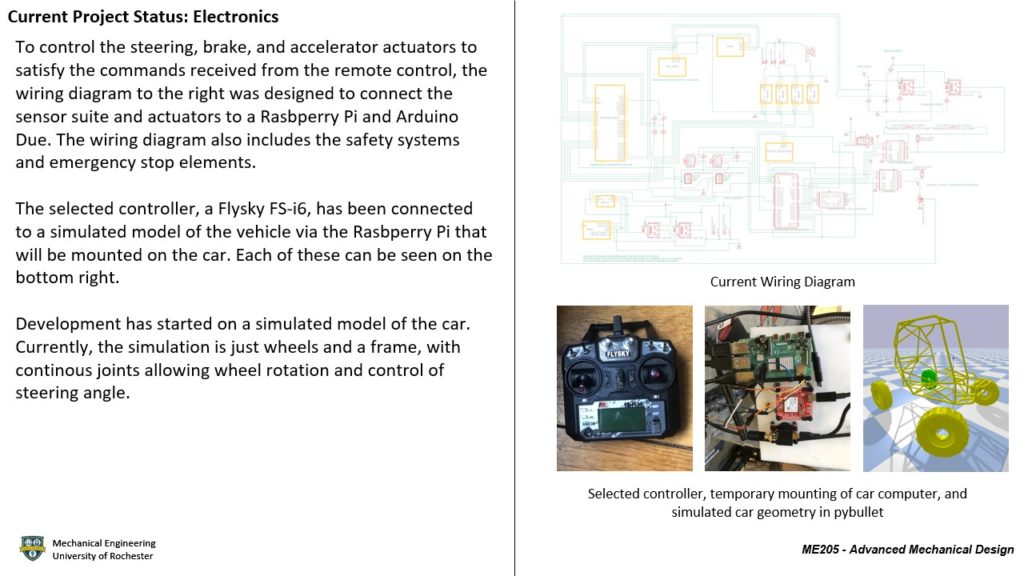
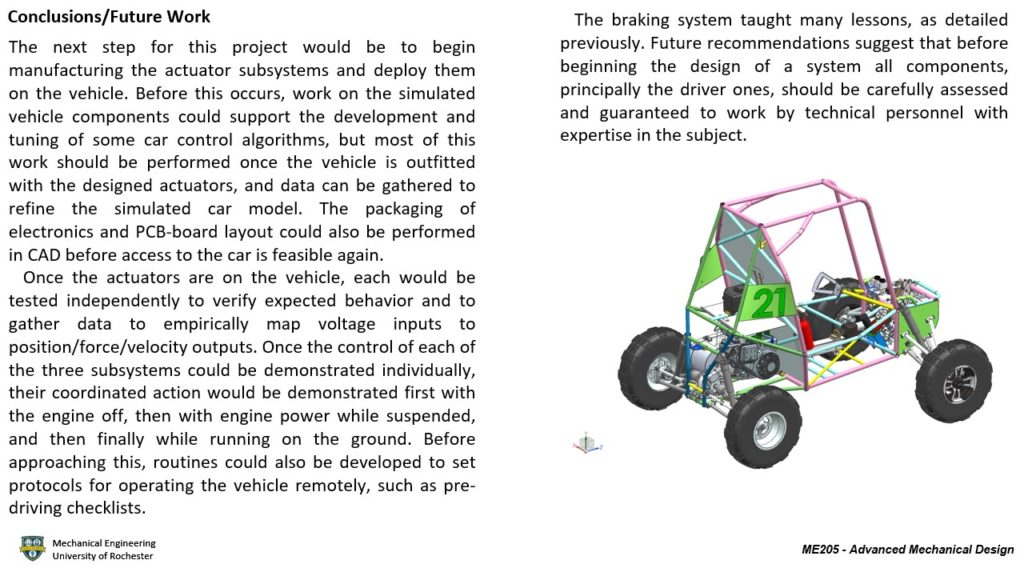
The project goal was to create methods to control the brakes, steering angle, and accelerator position of a Baja SAE off-road vehicle in a manner that allows the remote driving of the car. The team has created detailed models, simulations, and system documentation to ensure a strong foundation for the continuation of the project in the coming year. This project hopes to create new opportunities for future undergraduates to work on problems related to autonomous vehicles.