Group Members
 Elizabeth Rath |  Anthony Gurunian |  Yiyun Wang |  Andrew Weber |  Nathan Pinnette |
| erath@u.rochester.edu | agurunia@u.rochester.edu | ywang251@u.rochester.edu | aweber12@u.rochester.edu | npinnett@u.rochester.edu |
Problem Statement
The motivation for this project is the need for precise polymer deposition on Waveguide Enhanced Raman Spectroscopy Sensors (WERS). Focusing on achieving a 100μm resolution of the polymer deposition and control of the z-axis will allow researchers to accurately and precisely deposit aqueous fluids on these sensors or on other small, high-precision devices.
Customer Needs
- Product needs to be able to place polymer solutions on a small chip.
- Resolution of 100μm
- Precise X, Y, and Z axis control.
- Design compatibility with aqueous solutions and varying types of alcohols.
- Product that can place the polymers on the chips through adhesion forces rather than mechanical forces.
- Level printing surface
- Fluid deposition volume accuracy
Customer Wants
- Does not need to be fast, but could be relatively quick in future designs. Approximately 20-40 mm/s linear travel speed would be ideal.
- Minimal waste of fluid
- 10 cm2 printing surface
- Syringe mounted directly above where it is dispensed.
- Resolution of 10um in future designs
- Climate control within the device
Prototyping
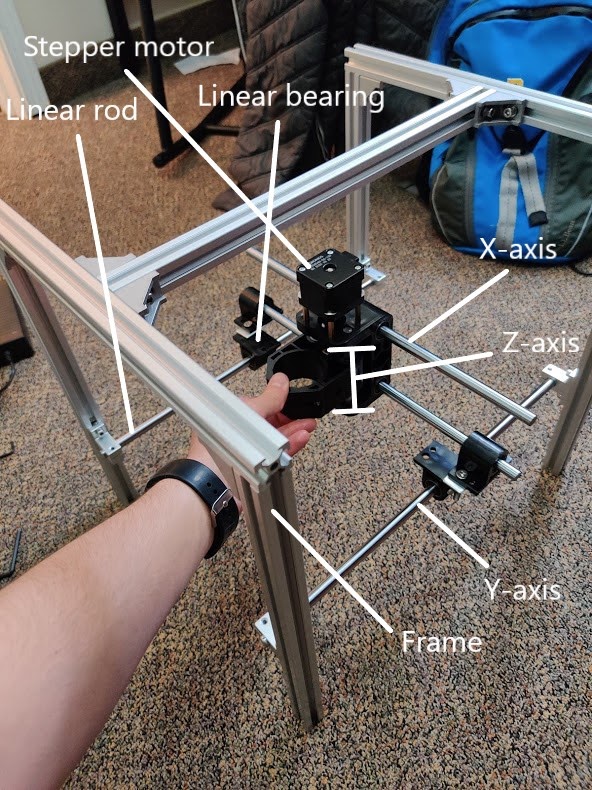
Prototype 1 – z-axis moving
Prototype 1: Too complex and too much fluid wasted. This prototype tested a fluid deposition surface that doesn’t move side to side. In this design, the fluid deposition plate would move along the z-axis. This prototype tested a timing belt and pulley system for controlling the axes. Also, for this design, the syringe pump was not directly connected to the device. Instead, the syringe pump was off to the side and connected by a long flexible tube.
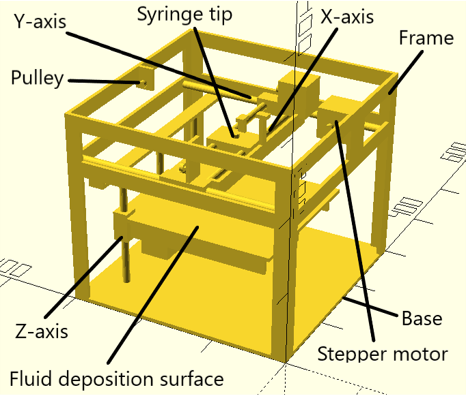
Prototype 2 – Stationary Fluid Deposition Surface
Prototype 2: Too complex and time inefficient. This prototype tested a design with a completely stationary fluid deposition surface. Very complex: z-axis is connected to the x-axis which is connected to the y-axis. This prototype would have the syringe pump directly connected to the device. This prototype also tested a timing belt system for controlling the axes. We determined from this prototype that we would be better off spending our time modifying a 3D printer or CNC machine instead of designing everything from scratch.
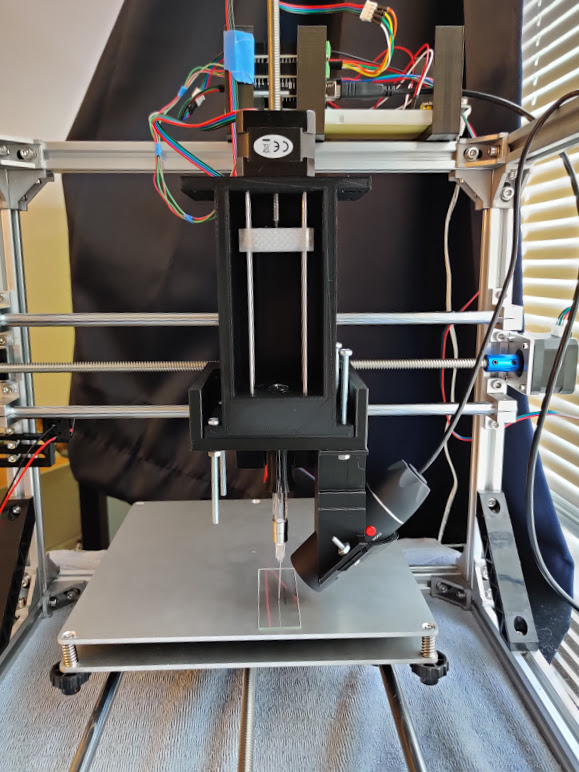
Prototype 3 – Final Design
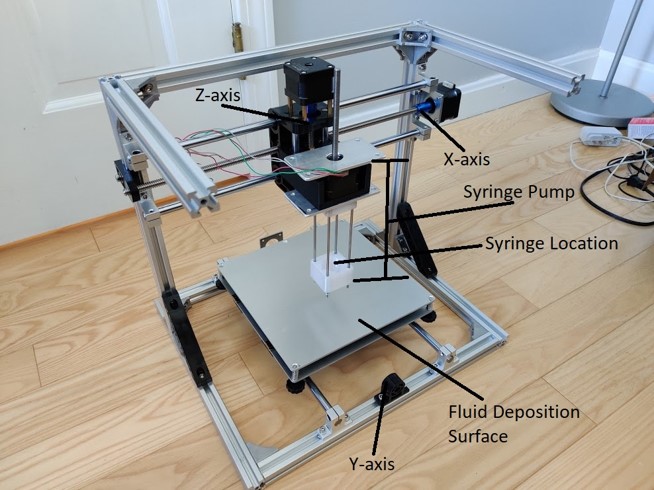
Prototype 3: Simple and time-efficient. For this prototype, we modified a CNC machine. This prototype is designed such that the fluid deposition plate moves along the y-axis. This prototype uses a lead-screw design for controlling the axes. Also, this prototype tested a lighter fluid deposition surface and a spring leveling system for each corner of the fluid deposition surface.
Testing results
Resolution Testing
- Video shows the device can move in 100 um increments
- Each movement is 4 steps of the motor, resulting in an interpolated resolution of 25 um
- This method was chosen because of the difficulty of measuring 25 um
Anti-Backlash Testing
- Used hand to push device against the anti-backlash spring and then released
- Syringe tip moved 200 um and then returned to the correct position/side of the lead-screw thread due to the anti-backlash spring
- The device will pause movement while dispensing the fluid, so the anti-backlash spring will return it to the correct side of the lead-screw thread if the force was great enough to overcome the spring while moving
What’s Next?
Some possible next steps include integrating automatic bed leveling system which could reduce the time needed for calibration, enclosing the device and putting moisture level controls for the fluid deposition environment, and preinstalling deposition patterns from the chip manufacturer to make the whole user interface easier to use.
Customer Feedback
Our customer was satisfied with our initial demo, and that any future features would be for quality-of-life/ease of use and are not required for the functionality of the device.
Our Customer
Matthew Z. Yates, Ph.D.
Professor; Scientist, Laboratory for Laser Energetics
Our Supervisor
Danielle Benoit, Ph.D.
Professor of Biomedical Engineering
Our TA
Emma Vogan