Team
- Francesca Daszak
- William Most
- Kai Avni
- Lianming Hu
Mentor
Thomas M. Howard, PhD, Electrical and Computer Engineering, UR
Abstract
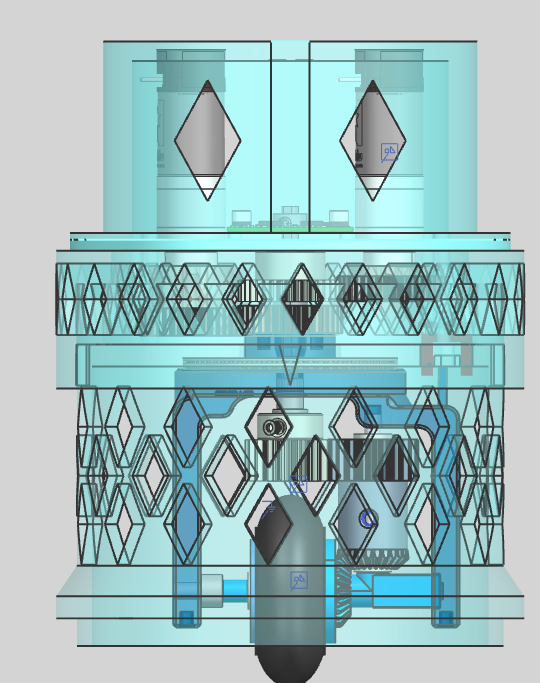
As a team, we were tasked with the creation of a robot for the University of Rochester ECE course 216. To achieve this, we have designed a fully modular robot where each wheel is capable of full 360-degree motion as well as translational motion, independent of the other wheels as it can be attached and detached at any time. This allows for more direct control while programming, which is the purpose of these robots, as well as a larger range of motion so it can go through more complex passages. We created this using primarily 3D printed parts to ensure relatively easy assembly for many robots, and each wheel module consists of a few large frames, one that will rotate with the wheel and the rest that will provide structural stability and house motors.