Team Members
Bryce Atchison
Benjamin Tait
Ashwin Menon
Supervisors
Professor Jack Mottley
Professor Daniel Phinney
Customers
N/A
Description
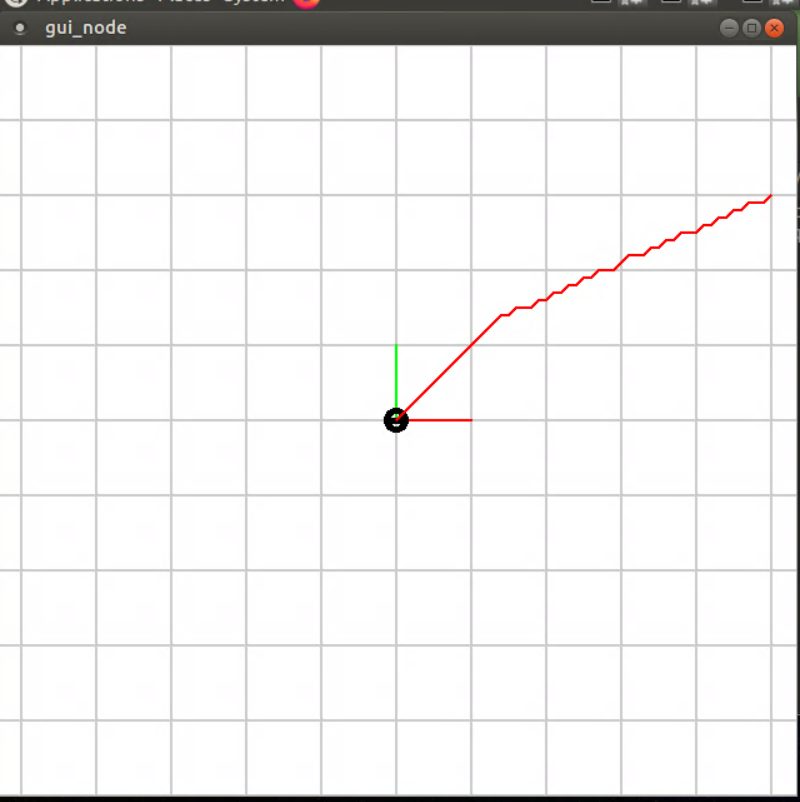
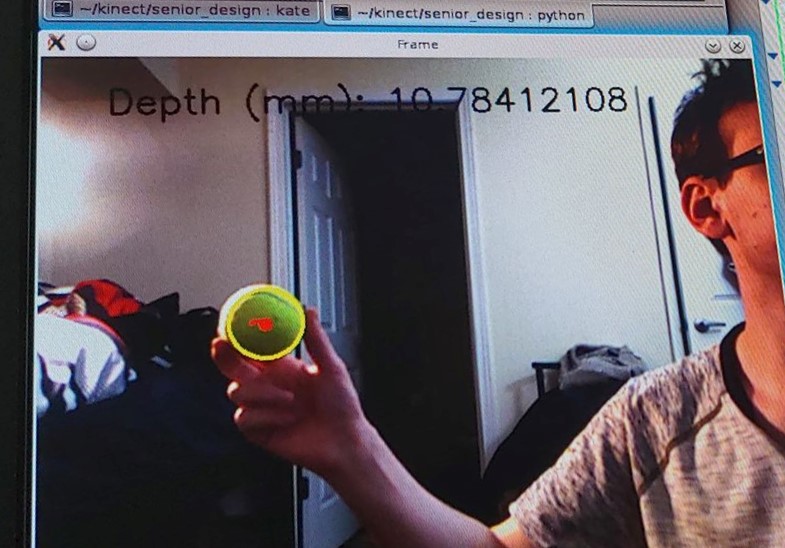
The original intention was to make a robot that would retrieve tennis balls. The focus has now been switched to make a realistic robot simulator that can navigate to waypoints, which would be provided by tennis ball locations. OpenCV is used for tennis ball recognition to provide locations for the simulated robot to navigate to.