Team Members
Sultan Sabha
Benjamin Zirps
Daniel Wong
Myles Duval
Supervisors
“Christopher Muir, PhD, Mechanical Engineering, UR” & “Laura Slane, PhD, Mechanical Engineering,UR”
Customers
Thomas M. Howard, PhD, Electrical and Computer Engineering, UR
Description
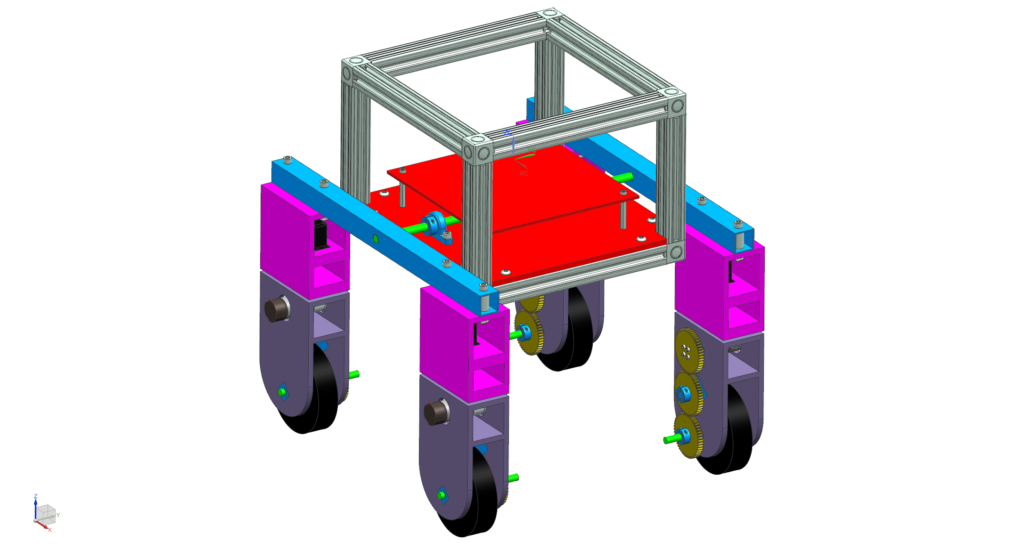
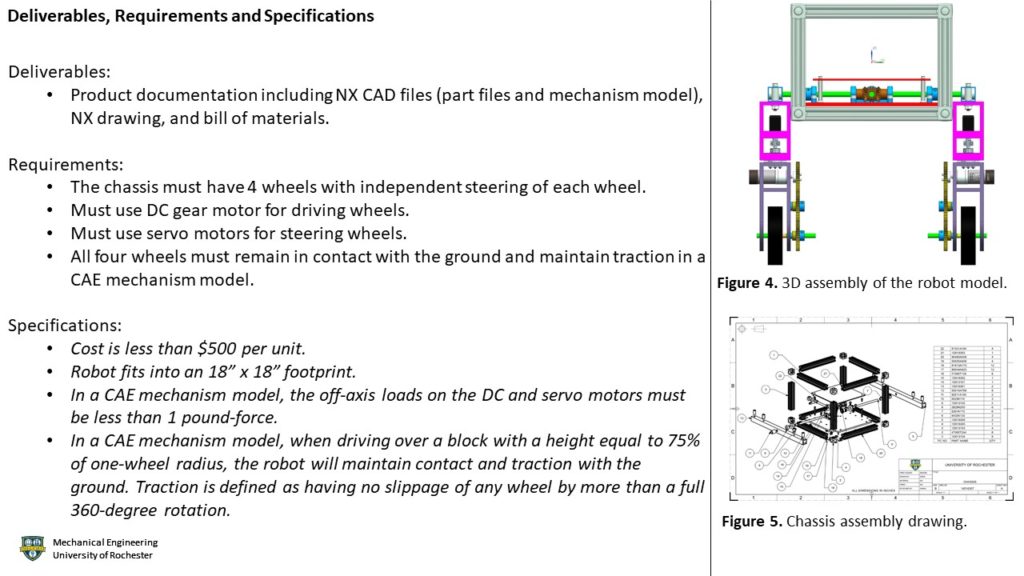
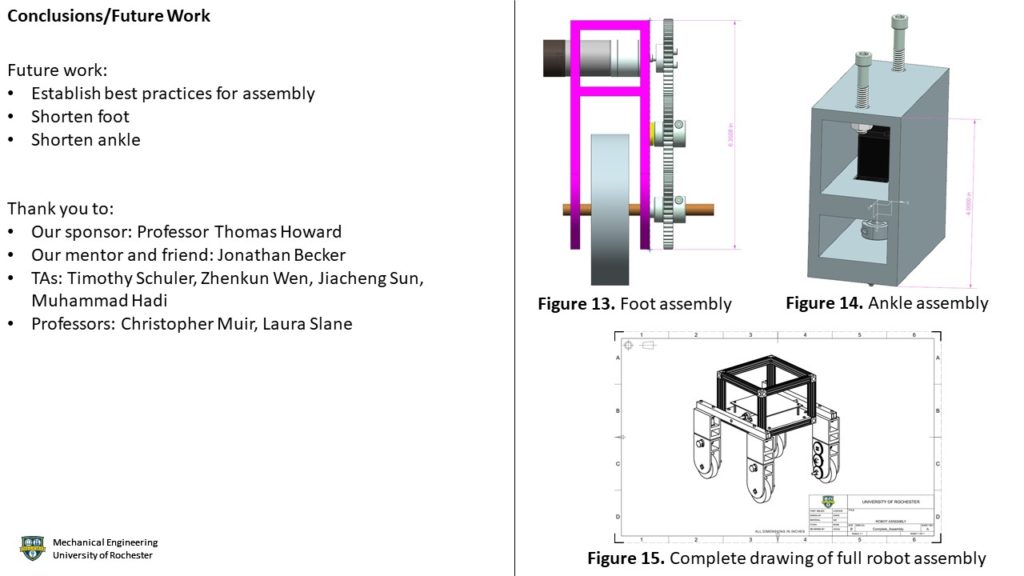
The project aims to design a steering system for robots used in various ECE courses. The robotic system has issues with lifetime, maneuverability, and mobility. The new model was designed with an aim to direct most of the off-axis load into the chassis while still maintaining the capability of the DC motor driving the wheel. These improvements helped in significantly increasing the lifetime of the motors. Additionally, the ability to steer each wheel independently increased the mobility of the robot.