



Team Members

Qinyao (Michael) Hou
Biomedical Engineering, Signals and Systems Concentration

Anabelle Creveling
Biomedical Engineering, Signals and Systems Concentration
Kade Kaufmann
Biomedical Engineering, Biomechanics Concentration

Ines Drissi Qeytoni
Biomedical Engineering, Cell and Tissue Concentration
Problem Statement
Hannah, a young adult with cerebral palsy and a limited visual field, relies on a walker for mobility and balance, but she cannot independently avoid obstacles and terrain changes that are outside her upward field of view. Existing assistive technologies do not address the combined motor, visual, and cognitive needs required for her to independently and safely navigate her environment.
Background
Hannah is an 18-year-old student at Monroe Community College who is attending a life skills development program. She has cerebral palsy, deafness, blindness, and cognitive delay, which affect how she moves, senses her surroundings, and responds to environmental information.
Her cerebral palsy creates mobility challenges such as muscle weakness, stiffness, fatigue, spasticity, and balance difficulties. Because of this, she relies on external support devices to help maintain stability. Hannah is also deaf in both ears and relies on cochlear implants. Even with implants, audio cues can be difficult for her to use in noisy environments. In addition, she is blind in one eye and has very limited vision in the other, with no lower peripheral or central vision and only limited upper peripheral vision.
Due to these combined challenges, Hannah often depends on environmental cues, such as ceiling lights, to move around. She may struggle to detect obstacles such as pillars, stairs, and people. Therefore, an assistive device for Hannah needs to be intuitive, reliable, and able to provide clear feedback without depending only on vision or sound.
Device Goals
The goal of this device is to increase Hannah’s independence by support her decision-making without overriding her control. The device is designed to attach to Hannah’s current walker and be easily transferred to a new walker if needed.
The device should detect nearby objects and dangerous ground changes, such as stairs or potholes. It should alert Hannah to obstacles using location-specific cues, helping her understand where the obstacle is coming from. The system should also include an accessible on/off switch and be able to last through a typical school day.
Design Overview
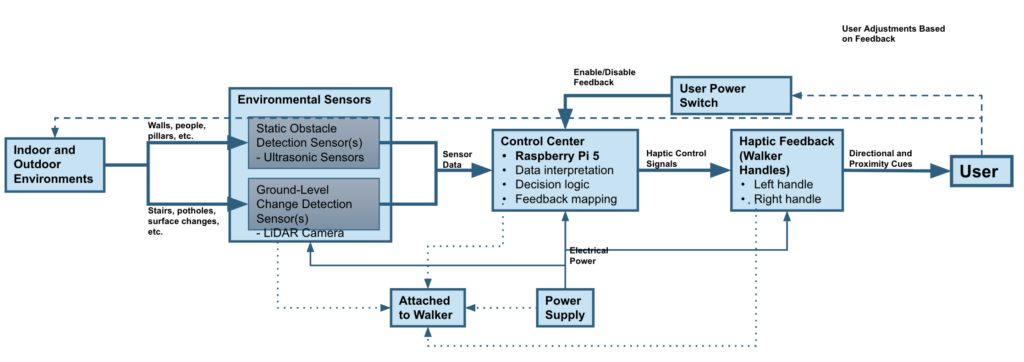
Sensor-Feedback Components
The sensor-feedback system combines ultrasonic sensors, a LiDAR camera, and haptic motor to help Hannah detect obstacles and ground hazards while using her walker.
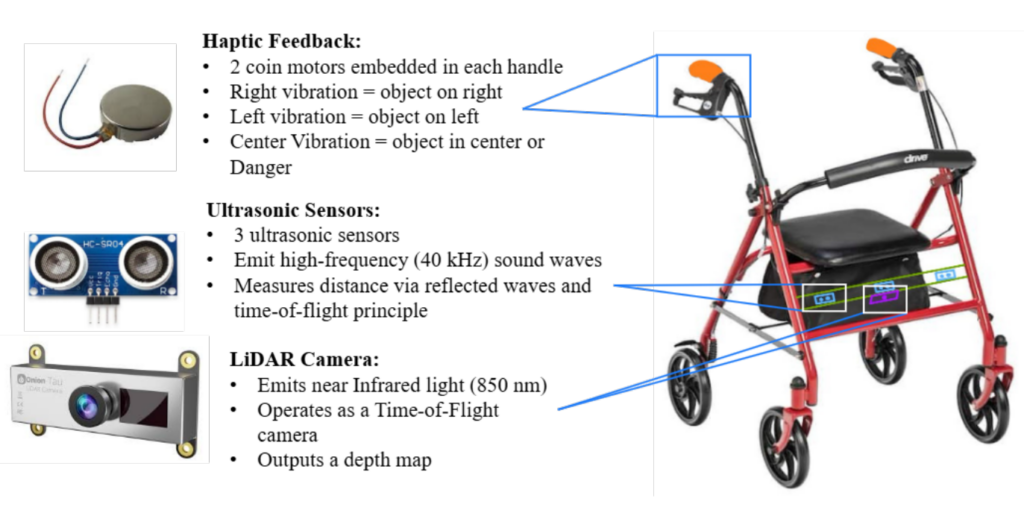
Ultrasonic Sensors
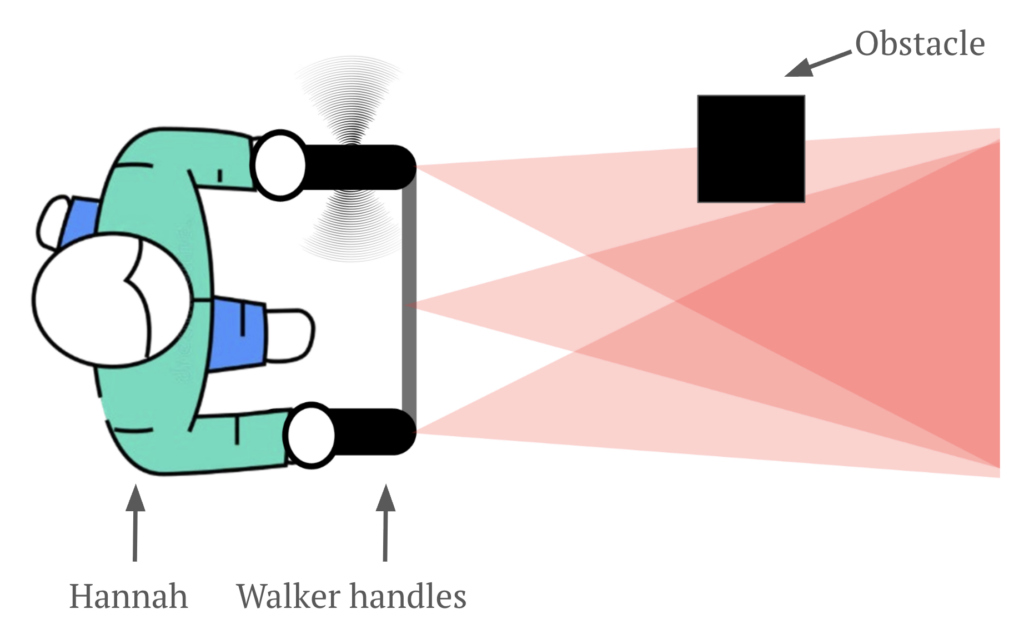
Three ultrasonic sensors are mounted on the walker to detect nearby objects in front of her and to the left or right. Based on where the object is detected, the system activates vibration motors in the walker handles to give Hannah location-specific feedback. For example, the left handle vibrates when a obstacle is on the left, the right handle vibrates when an obstacle is on the right, and both handles vibrate when an obstacle is directly ahead.
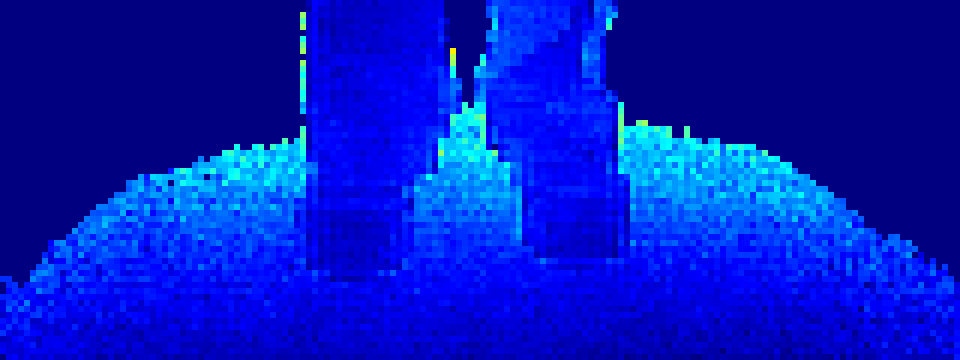
LiDAR Camera
The LiDAR camera is used to detect changes in the ground, such as stairs, potholes, or uneven surfaces. It creates a depth map of the area in front of the walker and compares the current ground view to a calibration image of a clear floor. If the system detects a major ground change, it alerts Hannah through the haptic feedback system.
Power
To make the design safer and more reliable, the device uses separate power sources for the sensor system and the haptic system. The sensor system, including the Raspberry Pi and connected sensors, is powered by four rechargeable 18650 lithium-ion batteries through a Geekworm X1202 4-cell UPS module designed for the Raspberry Pi 5. This setup helps to provide stable power for the main electronics and allows the system to operate without needing to stay plugged into a wall outlet.

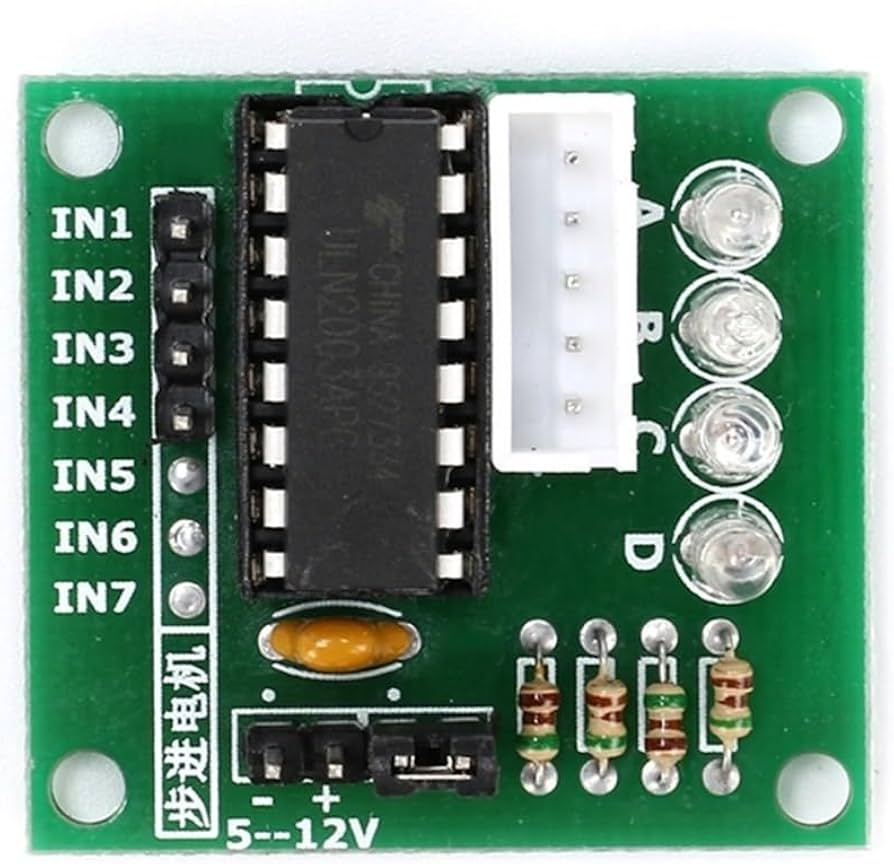
The haptic motors are powered separately using three AA batteries, providing about 4.5V total. This prevents the motors from drawing too much current directly from the Raspberry Pi. A ULN2003 motor driver is used between the Raspberry Pi and the vibration motors to protest the GPIO pins and safely control the motor output.
The system also includes accessible switches, including a main power switch attached to the Geekworm UPS and a quiet mode switch. The quiet mode switch allows the user or caregiver to turn off vibration feedback when needed while still keeping the system accessible and easy to control.
Demonstration
This demonstration shows Hannah using the walker-mounted assistive device in a simulated navigation setting. As she moves through the environment, the sensors detect nearby obstacles, while the haptic feedback system provides simple vibration cues through the walker handles.
The demonstration highlights how the device supports Hannah’s independence by helping her make safer navigation decision while still keeping her in control of her movement. Rather than replacing her judgment, the system provides additional environmental information in a clear and accessible way.
Future Directions
- Sensor Fusion: integrating data from LiDAR, ultrasonic sensors, and potentially others sensors to allow the system to better distinguish between obstacles, drop-offs, and uneven terrain
- Intelligent Hazard Classification: training machine learning models on depth data to differentiate terrain features and prioritize alerts based on severity and user safety
- Power Optimization & Embedded Reliability: optimizing power distribution and dedicating regulators for high-draw components (like LiDAR)
- Miniaturization: reducing the size and weight through custom PCB design and integrated components, allowing for more customer-ready devices
Acknowledgement
Course Professors: Scott Seidman, PhD & Benjamín Castañeda, PhD
Supervisor: Diane Dalecki, PhD
Project Liaison: Isabella Smith
Martin Gira; and the entire customer team at MCC!