
Team:
Hudson Ginocchio, Liam Kenny-Jagielski, Newt Perlman, Felipe Villanueva
Abstract:
This project presents the design and implementation of an automated mechanical sorting and dispensing system inspired by a Connect 4-style grid. The system integrates mechanical structures, electrical control, and software logic to transport, guide, and deposit objects into designated slots. A conveyor-based transport mechanism, controlled dropper system, a sorter mechanism (red and yellow chips) with guided pathways work together to achieve consistent chip placement. The project emphasizes system integration, reliability, and a systems engineering design approach demonstrating principles of mechatronics and real-time control.
Introduction & Project Overview:
The goal of this project was to develop an automated system capable of transporting and depositing Connect 4 chips into a structured 7×6 grid. Inspired by industrial material-handling systems, the design combines conveyor motion, guided pathways using vision and mechanics, and controlled-release mechanisms.
The system begins by transporting objects using a belt-driven mechanism vertically, after which they are guided through a series of mechanical paths that regulate motion and direction. A dropper mechanism ensures controlled release into a grid structure, simulating a structured placement system similar to game-based or sorting applications. A dropper mechanism ensures controlled release into a grid structure, simulating a structured placement system similar to game-based or sorting applications. After which, they are guided through a series of mechanical paths that regulate motion and direction. This project incorporates many engineering elements to bring a real, practical system.
Main Components: Electrical, Software, and Mechanical:
Electrical:
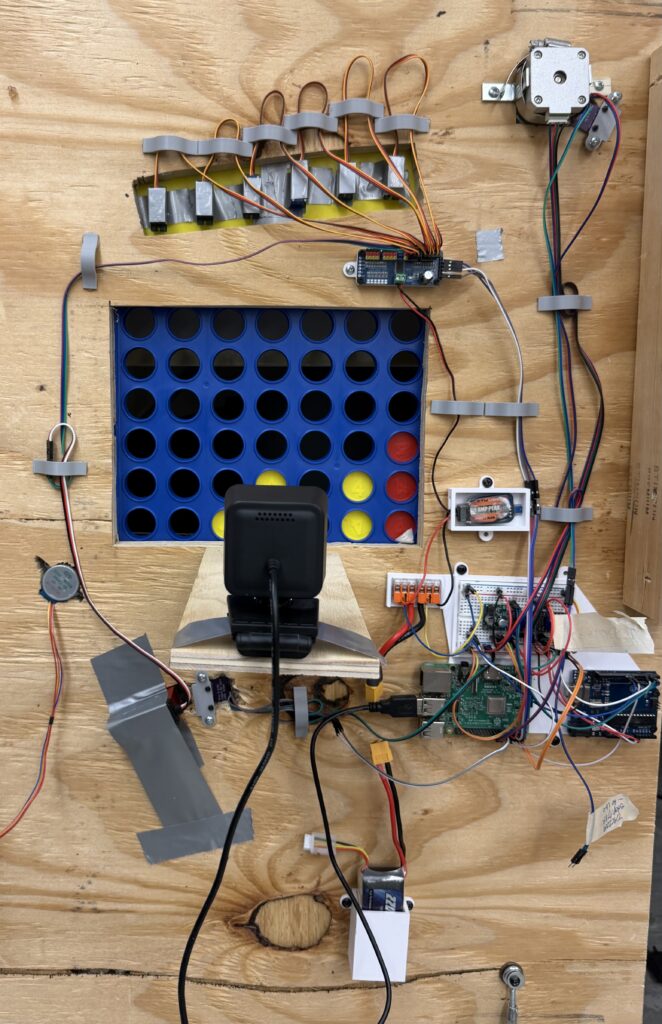
The electrical system is responsible for powering and controlling the actuation components of the project. This includes motors used for the conveyor belt mechanism and any additional actuators responsible for object release.
Key elements include:
- Stepper motors for conveyor belt movement
- Motor drivers for controlled actuation
- Batteries are used as a system’s power supply distribution for stable operation as well as an integrated buck converter to reduce higher voltages to lower voltages for consistent efficiency
- Wiring and control circuitry using Arduino and Raspberry Pi
The electrical design ensures consistent motion and reliable system behavior, forming the backbone of the automation process.
Software:
The software component coordinates the behavior of the system by controlling timing, sequencing, and actuation.
Key functionalities include:
- Motor control logic for conveyor operation
- Timing control for object release
- Chip sorter using a colored sensor
- Sequential coordination between transport and drop mechanisms
*Vision:

A vision system can be integrated to enhance the system by detecting object position, alignment, and classification. This would allow:
- Real-time chip tracking
- Improved color chip placement accuracy
- Intelligent sorting or decision-making
Mechanical:
The mechanical design is the most prominent aspect of the system and is responsible for physically guiding objects through the process.
Key features include:
- A vertical conveyor belt system for lifting objects
- A structured 6×7 grid for final chip placement
- Guided pathways that control object direction and speed
The design prioritizes simplicity, gravity-assisted motion, and consistency.
Function Block Diagram:
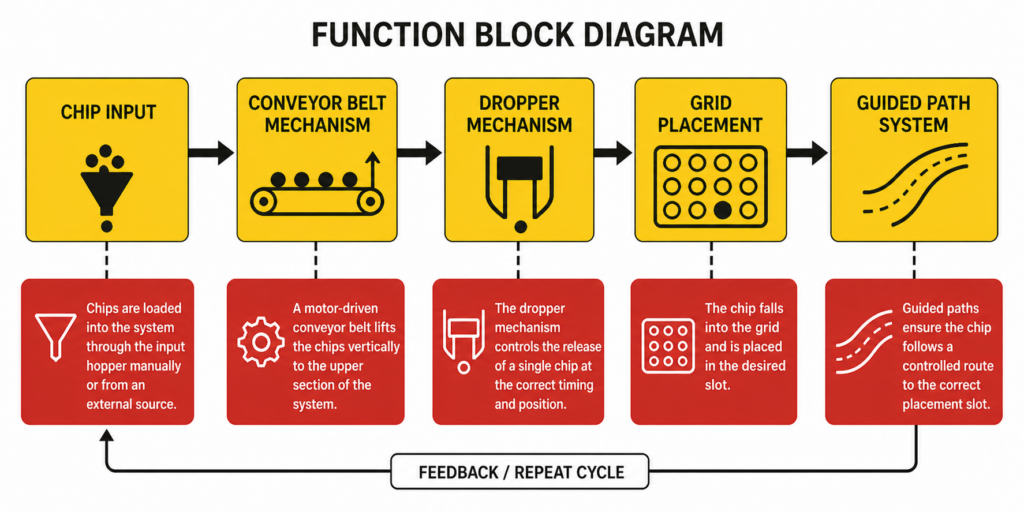
Conveyor Belt Mechanism:

*Convey Belt System shown horizontally*
The conveyor belt mechanism is responsible for vertically transporting objects from the input stage to the upper section of the system. It consists of a belt loop driven by 2 stepper motors and guided by pulleys.
Key design considerations:
- Consistent speed for predictable timing
- Sufficient friction to carry objects without slipping
- Alignment to ensure smooth vertical motion
This mechanism serves as the primary transport system and sets the pace for the rest of the process. The conveyor belt mechanism is responsible for vertically transporting chips from the input stage to the upper dispensing region of the system. It utilizes a continuous loop belt driven by a motor and supported by pulleys to ensure smooth and consistent motion. The design prioritizes sufficient friction between the belt and chips to prevent slipping during vertical transport while maintaining a controlled speed. Alignment of the belt and structural supports was critical to minimize mechanical losses and ensure repeatable positioning at the top of the system. This mechanism establishes the system’s throughput rate and directly impacts the timing and synchronization of all system processes.
Dropper Mechanism:

The dropper mechanism controls when and how chips are released into the system. It ensures that chips are not released prematurely and are positioned correctly before entering the guided pathway or grid.
Key features:
- Controlled opening or gating system
- Timing-based or actuator-based release
- Alignment with grid structure
This component is critical for ensuring accuracy and preventing collisions or misplacement. The dropper mechanism regulates the controlled release of objects once they reach the top of the conveyor system. It is designed to prevent premature release and ensure that only one chip is dispensed at a time, maintaining system consistency. The mechanism relies on a physical gating structure that aligns chips before allowing them to pass into the next stage. Timing and positioning are critical, as improper release could lead to collisions or misrouting within the guided path system. This component serves as the primary control point for transitioning the chips from active transport to passive motion.
Release Mechanism:
Modified design of the original Connect 4 release mechanisms involving a servo motor.
Design focus:
- Smooth transition from guided path to grid
- Minimization of bounce or misalignment
- Reliable, repeatable operation
The release mechanism governs the transition of objects from the 6×7 grid into the sorter then guided path. The design minimizes unwanted bouncing and supports the integrity of the Connect 4 game and while also having a controlled exit. Proper synchronization with upstream mechanisms is essential to maintain flow continuity and prevent congestion.
Sorter Mechanism:
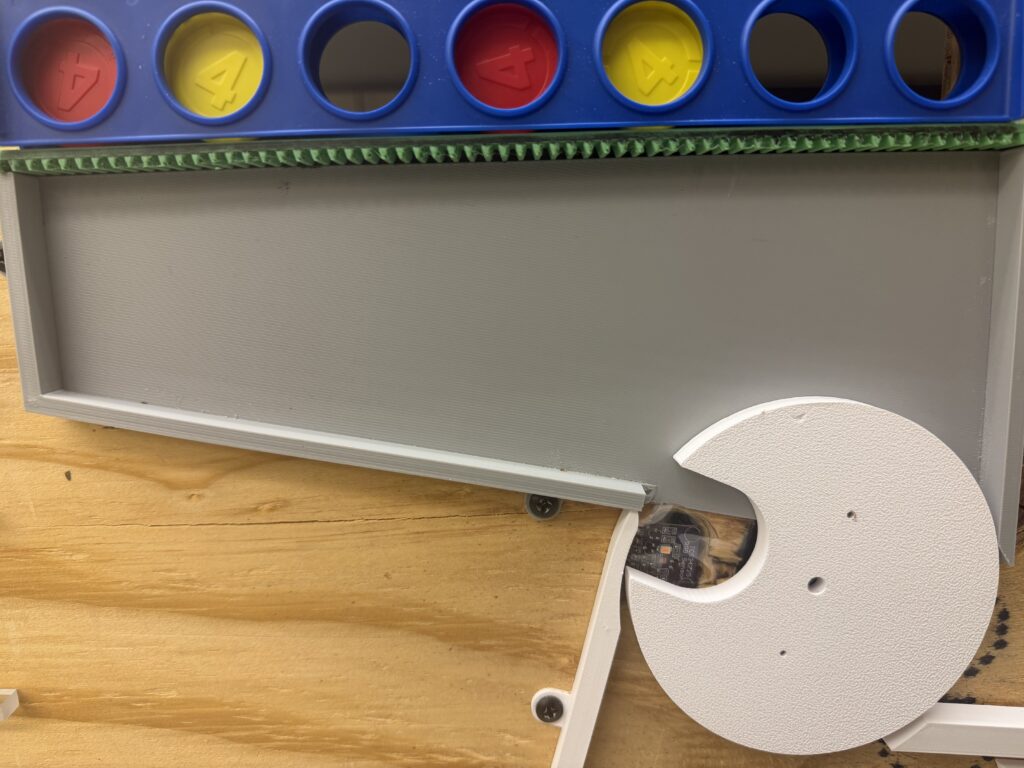
Once the chips are released from the Release Mechanism all playing chips fall vertically into a zone that is then sorted by corresponding color. Red goes to the left while yellow goes to the right.
Key aspects:
- Color sensor to differentiate the red and yellow chips
- Gravity-assisted motion
- High convenience for when the game ends
This mechanism demonstrates how simple mechanical design can replace complex control systems. The sorter mechanism directs the red and yellow chips towards their specific place after the game concludes. It leverages gravity and mechanical design to control object trajectory without the need for active control components. The geometry of the box region makes sure that the chips have a consistent path towards the sorter which reduces randomness and ensures predictable motion through the system. This mechanism demonstrates how effective mechanical design and controls can simplify the needs of a complex solution.
Guided Path System:
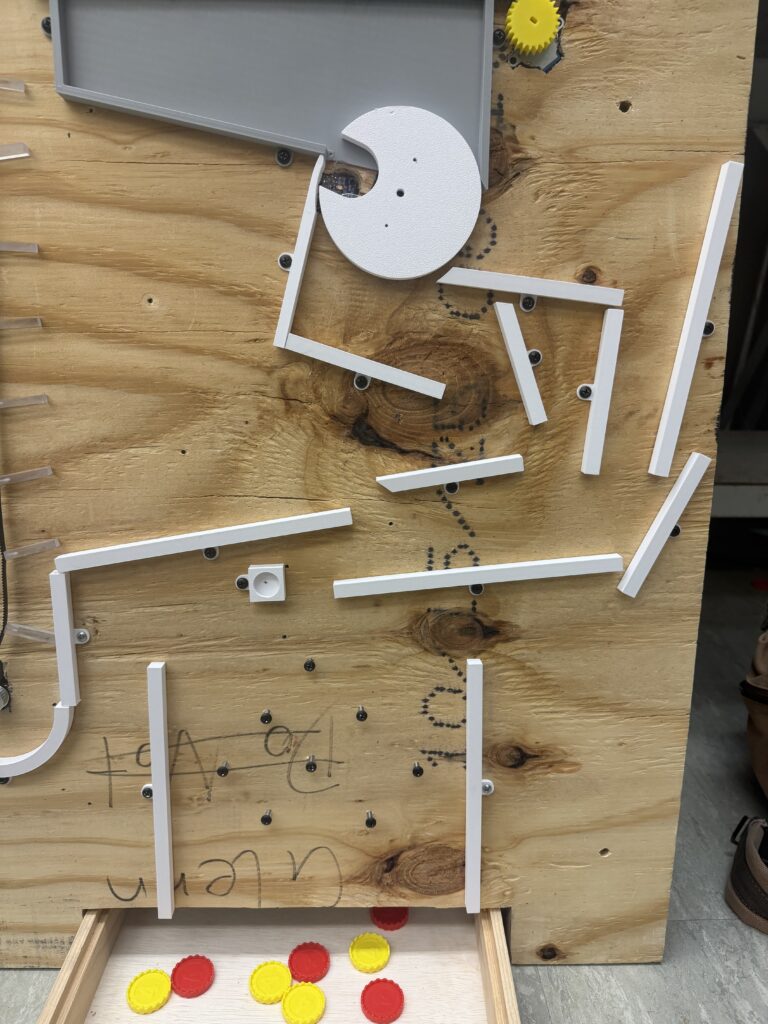
The guided path system directs chips from the sorter mechanism toward the appropriate release point using a network of angled channels and barriers. The red is directed to the left where the drop off point is at the vertical conveyor belt. The yellow is directed towards the right so that it arrives back to the player. Friction, spacing, and angle selection were key considerations to ensure smooth transitions between segments. The system minimizes object collisions and ensures that objects remain within defined paths throughout their descent. This component acts as the bridge between controlled release and final placement, ensuring consistent system behavior.
Testing & Results:
The system was tested by running multiple trials to evaluate the consistency and reliability of object transport, release, and placement. Performance metrics focused on successful delivery rate, placement accuracy within the grid, overall system timing and synchronization for system repeatability. Results showed that the conveyor and dropper mechanisms operated reliably, with consistent object delivery to the guided path system. Overall, the system demonstrated effective integration of mechanical, electrical, and software components and achieved its primary objective of automated chip placement for Connect 4 gameplay.
Conclusion:
This project successfully demonstrated the design and integration of a multi-stage mechanical system for automated object transport and placement. By combining conveyor-driven motion with passive guiding and controlled release mechanisms, the system achieved consistent and repeatable performance. The project highlights the importance of synchronization between mechanical, software, and electrical components and the impact of small design decisions on overall system behavior. Additionally, it showcases how simple mechanical principles can be leveraged to reduce the need for complex control systems.