Team Members
- Enrrique Garcia, Electrical and Computer Engineering ’26
- IIan Pinco, Electrical and Computer Engineering ’26
- Jacob Greenberg, Electrical and Computer Engineering ’26
- Robert VanDyke, Electrical and Computer Engineering ’26
Mentors
- Professor Jack Mottley
- Professor Dan Phinney
- Professor Irving Barron Martinez
Introduction
Locating books in large academic libraries can be difficult due to complex shelving layouts and unfamiliar call-number systems. This project presents the Library Compass, a handheld navigation device designed to guide users toward book locations inside Rush Rhees Library. The system converts Library of Congress call numbers into mapped shelf coordinates and determines the correct direction using trilateration-based positioning and inertial sensing. Stepper motors then rotate a physical pointer to indicate the direction of the destination shelf.
Motivation / Problem Statement
- Difficulty locating books in large libraries
- Time wasted searching
- No intuitive indoor navigation
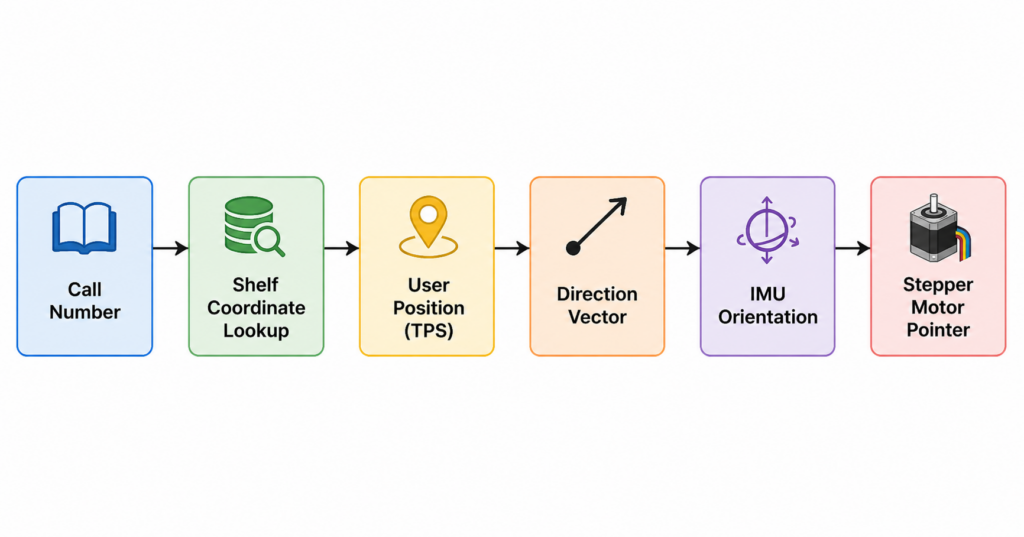
System Overview (Big Picture Pipeline)
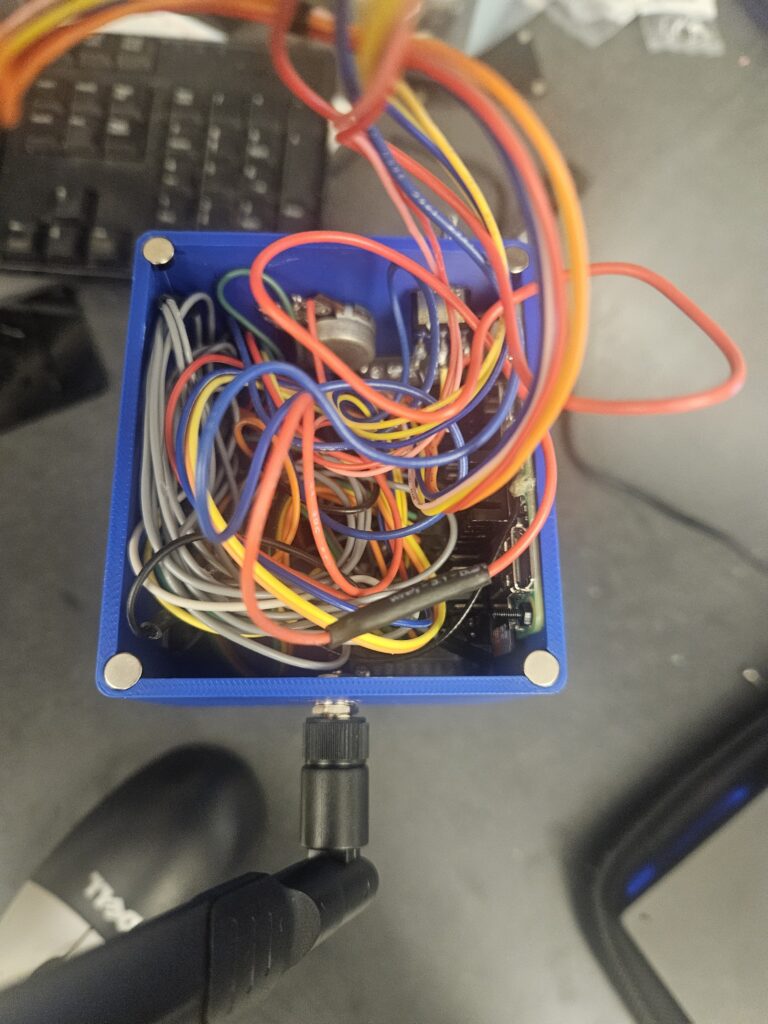
Physical Device (Hardware)
- Include:
- Raspberry Pi Controller
- IMU sensor (orientation tracking)
- Stepper motor (pointer movement)
- 3D-printed housing + pointer disk
- Power system (battery in handle)
- Explain:
- User enters call number
- Device computes direction
- Pointer Physically rotates toward shelf
Software System (Core Logic)
- Call number parsing (Library of Congress system)
- CSV-based shelf mapping
- Coordinate System (tile – meter conversion)
- Direction vector calculation
- Originally built in Python – ported to C/C++
- Runs lookup + navigation logic
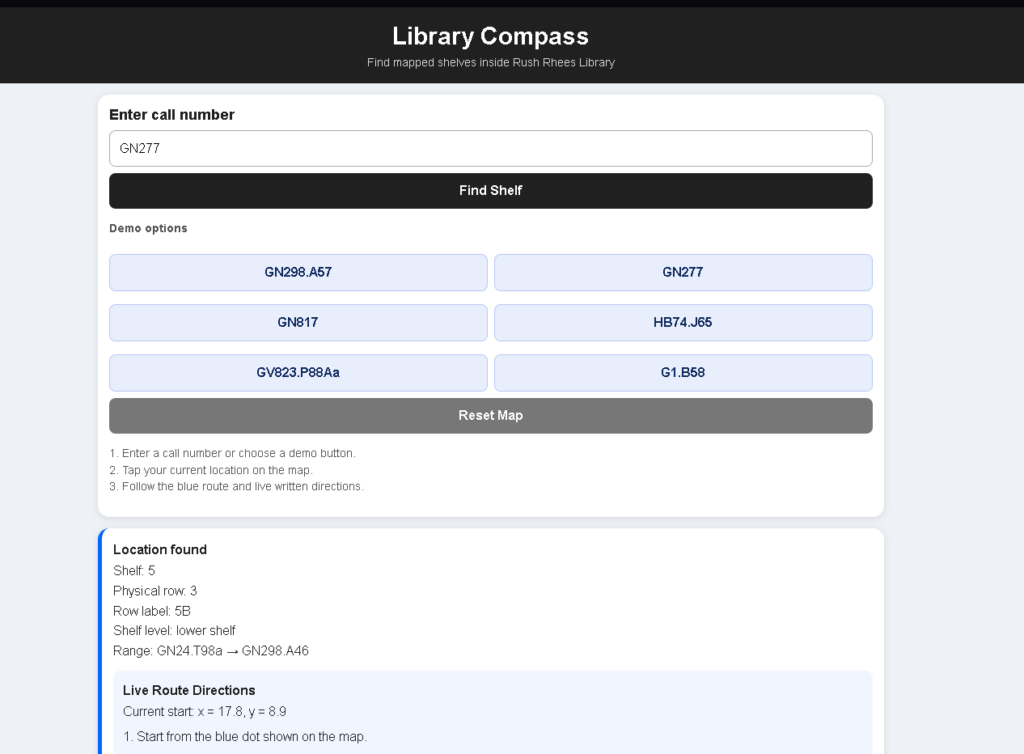
Backup Demo: Web + Android App
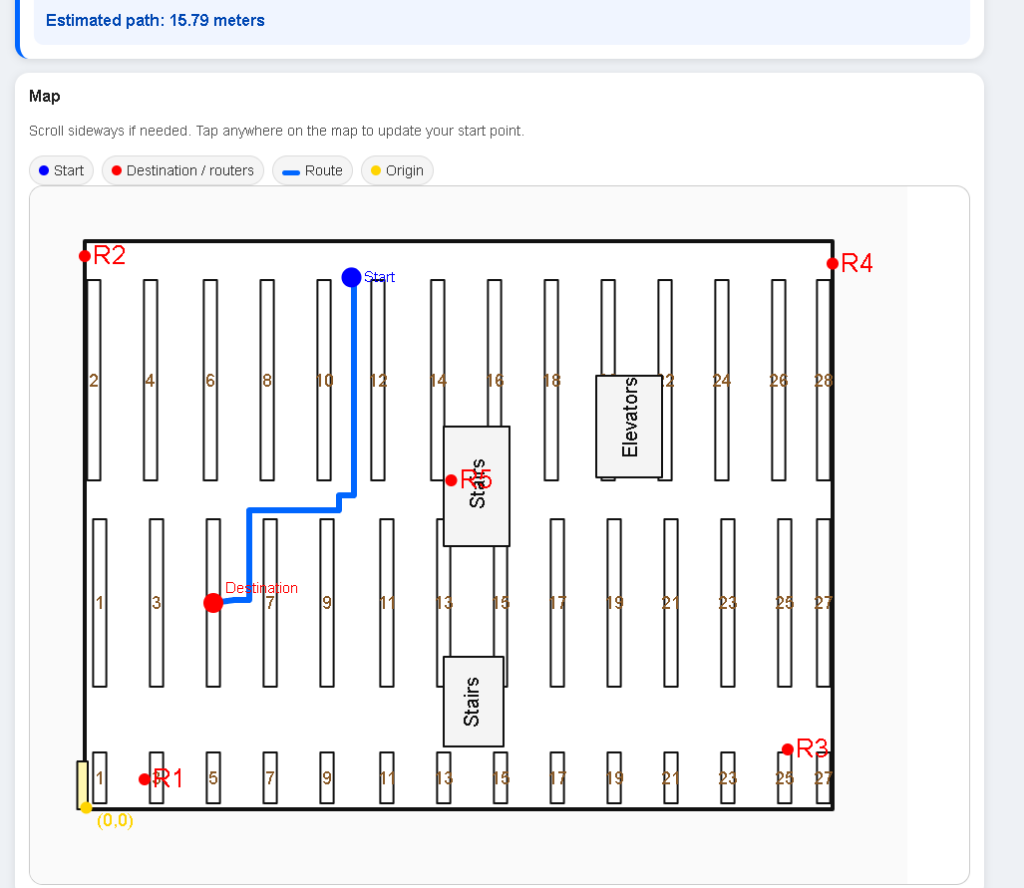
As a backup and demonstration platform, we developed a web-based version of the Library Compass that is also deployed as an Android mobile application. This system replicates the core functionality of the physical device by allowing users to input a call number and receive the corresponding shelf location and navigation path on a digital map. The app provides a visual representation of the library layout, including obstacles such as shelves, stairs, and elevators, ensuring realistic navigation. This backup solution allows users and judges to interact with the system easily without relying on the physical hardware, while also demonstrating the scalability of the project into a fully software-based indoor navigation tool.
Results
The Library Compass system successfully demonstrates the core concept of translating Library of Congress call numbers into corresponding shelf locations within Rush Rhees Library. The lookup algorithm reliably maps user input to predefined shelf coordinates using a structured CSV-based system, and the supporting software correctly computes direction and navigation data. Additionally, the CAD models, wiring, and overall hardware integration were completed and function as intended, confirming the feasibility of the physical design.
However, the physical prototype does not currently perform full real-time navigation as intended due to limitations with the IMU sensor. The IMU is unable to consistently determine accurate orientation, which prevents the system from reliably pointing toward the correct shelf direction. As a result, the stepper motor output cannot reflect precise navigation in its current state.
To address this limitation, a web-based and Android application was developed as a backup demonstration platform. This system successfully replicates the intended functionality of the Library Compass by allowing users to input a call number and visualize the correct shelf location and navigation path on a digital map. The app includes realistic constraints such as shelves, stairs, and elevators, and serves as a reliable representation of how the physical device is intended to operate. Together, these results validate the overall system design while highlighting areas for improvement in sensor-based orientation.
Future Recommendations
- Start Earlier on IMU Integration (Most Important):
- Future teams should begin working with IMU concepts, calibration, and implementation much earlier in the project timeline. A deeper understanding of orientation tracking, sensor fusion, and drift correction is critical, as this was the main limitation preventing full system functionality.
- Improve Indoor Positioning:
- Implement more accurate real-time positioning methods such as Wi-Fi triangulation, Bluetooth beacons, or ultra-wideband (UWB) to better determine the user’s location inside the library.
- Enhance Navigation and Pathfinding:
- Incorporate optimized pathfinding algorithms (e.g., shortest path routing) to guide users step-by-step rather than only providing directional output.
- Refine the Physical Device:
- Improve motor alignment, structural stability, and enclosure design to increase reliability and usability of the hardware system.
- Improve Sensor Accuracy and Calibration:
- Explore advanced IMU filtering techniques (such as complementary or Kalman filters) to reduce drift and improve orientation accuracy.
- Expand the Software Platform:
- Further develop the web and mobile applications with real-time updates, improved UI/UX, and interactive navigation feature
Acknowledgements
We would like to thank our professors and advisors for their guidance and support throughout the development of this project. Their feedback and insight were instrumental in shaping both the technical design and overall direction of the Library Compass