4. Keywords Archive
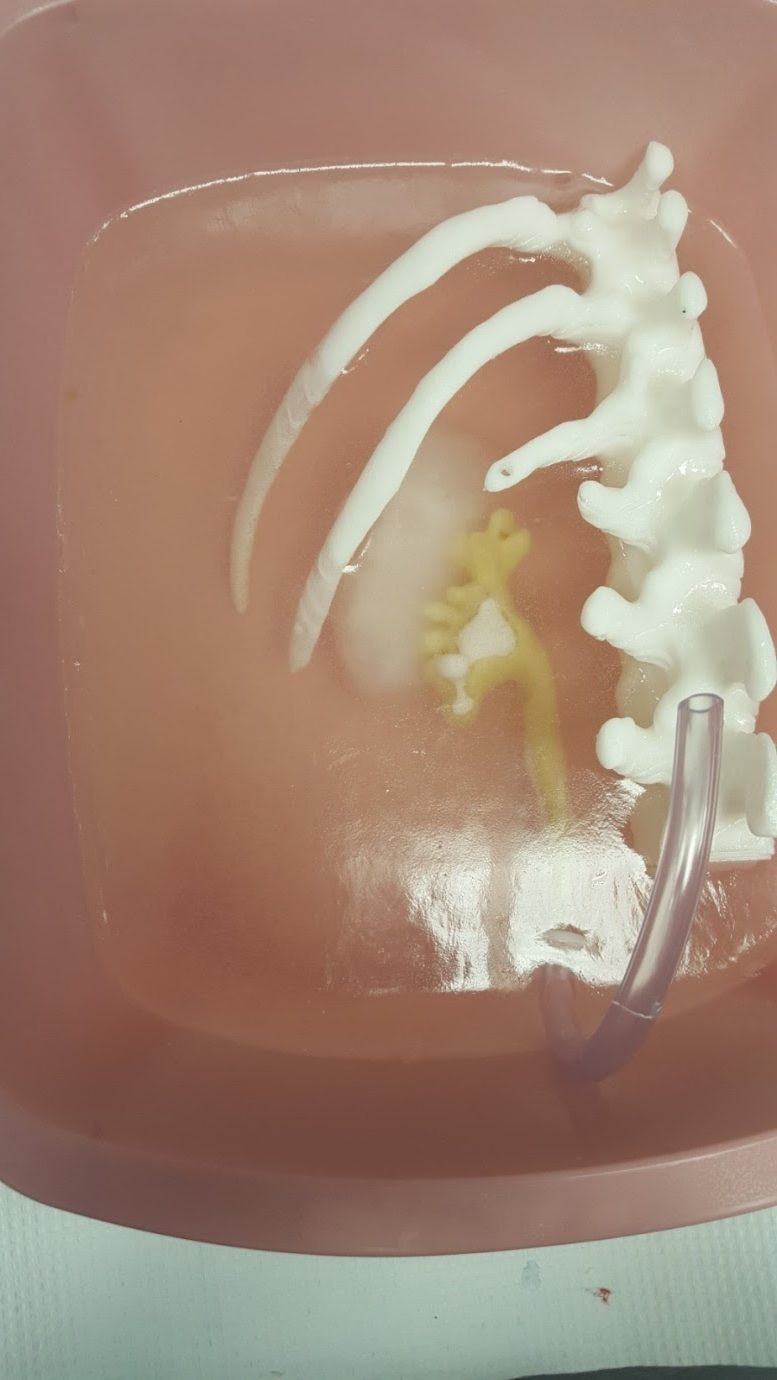
Investigating Materials for Simulating Percutaneous Nephrolithotomy Surgery
April 22, 2020
Identify Near Infrared transparent polymers to simulate human tissue for surgical training applications at UR Medical Center.